
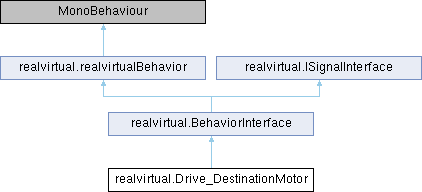
Drive_DestinationMotor provides position-controlled movement for Drive components. More...
Public Member Functions | |
| void | CalcFixedUpdate () |
 Public Member Functions inherited from realvirtual.BehaviorInterface Public Member Functions inherited from realvirtual.BehaviorInterface | |
| new List< BehaviorInterfaceConnection > | GetConnections () |
| Returns a list of behavior interface connections for this component. | |
| new List< Signal > | GetSignals () |
| Returns a list of connected signals for this component. | |
| Public Member Functions inherited from realvirtual.realvirtualBehavior | |
| virtual void | OnOwnershipChanged (bool isOwner) |
| Called when network ownership changes. | |
| void | SetNetworkOwner (bool isOwner) |
| Sets IsNetworkOwner and triggers OnOwnershipChanged callback. | |
| void | PreStartSim () |
| Is called by the realvirtualController before the component is started. | |
| void | StartSim () |
| Is called by the realvirtualController to start or stop the component. | |
| void | StopSim () |
| Vector3 | DirectionToVector (DIRECTION direction) |
| Transfers the direction enumeration to a vector. | |
| DIRECTION | VectorToDirection (bool torotatoin, Vector3 vector) |
| Transfers a vector to the direction enumeration. | |
| float | GetLocalScale (Transform thetransform, DIRECTION direction) |
| List< BehaviorInterfaceConnection > | UpdateConnectionInfo () |
| List< Signal > | GetConnectedSignals () |
| void | SetVisibility (bool visibility) |
| Sets the visibility of this object including all subobjects. | |
| List< BehaviorInterfaceConnection > | GetConnections () |
| List< Signal > | GetSignals () |
| GameObject | GetChildByName (string name) |
| Gets a child by name. | |
| List< GameObject > | GetChildsByName (string name) |
| Gets all child by name. | |
| GameObject | GetChildByNameAlsoHidden (string name) |
| List< GameObject > | GetAllMeshesWithGroup (string group) |
| List< GameObject > | GetAllWithGroup (string group) |
| List< GameObject > | GetAllWithGroups (List< string > groups) |
| List< GameObject > | GetAllMeshesWithGroups (List< string > groups) |
| List< string > | GetMyGroups () |
| List< GameObject > | GetMeshesWithSameGroups () |
| List< GameObject > | GetAllWithSameGroups () |
| MeshRenderer | GetMeshRenderer () |
| Gets the mesh renderers in the childrens. | |
| void | SetCollider (bool enabled, bool includeTriggers=true) |
| sets the collider in all child objects | |
| void | ErrorMessage (string message) |
| Displays an error message. | |
| void | ChangeConnectionMode (bool isconnected) |
| void | Log (string message) |
| Logs a message. | |
| void | Log (string message, object obj) |
| Logs a message with a relation to an object. | |
| void | Warning (string message, object obj) |
| Logs a warning with a relation to an object. | |
| void | Error (string message, object obj) |
| Logs an error with a relation to an object. | |
| void | Error (string message) |
| Logs an error. | |
| GameObject | DebugPosition (string debugname, Vector3 position, Quaternion quaternation, float scale) |
| Displays a gizmo for debugging positions. | |
| void | SetFreezePosition (bool enabled) |
| Freezes all child components to the current poosition. | |
| void | SetRbConstraints (RigidbodyConstraints constraints) |
| virtual void | AwakeAlsoDeactivated () |
Public Attributes | |
| float | CurrentPositionScale |
| Scale factor for the current position feedback. | |
| float | CurrentPositionOffset |
| Offset applied to position command and feedback in millimeters. | |
| bool | ScaleFeedbackPosition |
| If true, applies scale and offset to position feedback. | |
| PLCOutputFloat | Speed |
| Current Speed of the drive in millimeters / second. | |
| PLCOutputBool | StartDrive |
| Start to drive Signal. | |
| PLCOutputFloat | Destination |
| Destination position of the drive in millimeters. | |
| PLCOutputFloat | Acceleration |
| Acceleration of the drive in millimeters / second. | |
| PLCOutputFloat | TargetSpeed |
| Target (maximum) speed of the drive in mm/ second. | |
| PLCInputFloat | IsAtPosition |
| Signal is true if Drive is at destination position. | |
| PLCInputFloat | IsAtSpeed |
| Signal for current Drive speed in mm / second. | |
| PLCInputBool | IsAtDestination |
| Signal if Drive is at Destination. | |
| PLCInputBool | IsDriving |
| Signal is true if Drive is currently driving. | |
| Public Attributes inherited from realvirtual.BehaviorInterface | |
| List< BehaviorInterfaceConnection > | ConnectionInfo |
| Public Attributes inherited from realvirtual.realvirtualBehavior | |
| string | Name |
| The name of the component if it should be different from the GameObject name. | |
| ActiveOnly | Active |
| GameObject | FromTemplate |
| realvirtualController | realvirtualController |
| bool | HideNonG44Components |
| bool | SceneIsAdditive |
| bool | ForceStop |
| bool | IsNetworkOwner |
| True when this component owns its simulation (local authority). Set to false by MultiplayerWEB on remote clients. | |
Protected Member Functions | |
| override void | OnStartSim () |
| Protected Member Functions inherited from realvirtual.realvirtualBehavior | |
| bool | hidename () |
| bool | hideactiveonly () |
| virtual void | OnStopSim () |
| virtual void | OnPreStartSim () |
| MU | GetTopOfMu (GameObject obj) |
| Gets the top of an MU component (the first MU script going up in the hierarchy) | |
| void | InitGame4Automation () |
| Initialiates the components and gets the reference to the realvirtualController in the scene. | |
| virtual void | AfterAwake () |
| void | Awake () |
Additional Inherited Members | |
| Public Types inherited from realvirtual.realvirtualBehavior | |
| enum | ActiveOnly { Always , Connected , Disconnected , Never , DontChange } |
| Static Public Member Functions inherited from realvirtual.realvirtualBehavior | |
| static bool | DirectionIsLinear (DIRECTION direction) |
| Gets back if the direction is linear or a rotation. | |
| Properties inherited from realvirtual.ISignalInterface | |
| GameObject | gameObject [get] |
Detailed Description
Drive_DestinationMotor provides position-controlled movement for Drive components.
Implements servo-like behavior with target position control, speed regulation, and acceleration management. Ideal for precise positioning applications like NC axes, robotics, and automated positioning systems.
Member Function Documentation
◆ CalcFixedUpdate()
| void realvirtual.Drive_DestinationMotor.CalcFixedUpdate | ( | ) |
Implements realvirtual.IDriveBehavior.
◆ OnStartSim()
|
protectedvirtual |
Reimplemented from realvirtual.realvirtualBehavior.
Member Data Documentation
◆ Acceleration
| PLCOutputFloat realvirtual.Drive_DestinationMotor.Acceleration |
Acceleration of the drive in millimeters / second.
◆ CurrentPositionOffset
| float realvirtual.Drive_DestinationMotor.CurrentPositionOffset |
Offset applied to position command and feedback in millimeters.
◆ CurrentPositionScale
| float realvirtual.Drive_DestinationMotor.CurrentPositionScale |
Scale factor for the current position feedback.
◆ Destination
| PLCOutputFloat realvirtual.Drive_DestinationMotor.Destination |
Destination position of the drive in millimeters.
◆ IsAtDestination
| PLCInputBool realvirtual.Drive_DestinationMotor.IsAtDestination |
Signal if Drive is at Destination.
◆ IsAtPosition
| PLCInputFloat realvirtual.Drive_DestinationMotor.IsAtPosition |
Signal is true if Drive is at destination position.
◆ IsAtSpeed
| PLCInputFloat realvirtual.Drive_DestinationMotor.IsAtSpeed |
Signal for current Drive speed in mm / second.
◆ IsDriving
| PLCInputBool realvirtual.Drive_DestinationMotor.IsDriving |
Signal is true if Drive is currently driving.
◆ ScaleFeedbackPosition
| bool realvirtual.Drive_DestinationMotor.ScaleFeedbackPosition |
If true, applies scale and offset to position feedback.
◆ Speed
| PLCOutputFloat realvirtual.Drive_DestinationMotor.Speed |
Current Speed of the drive in millimeters / second.
◆ StartDrive
| PLCOutputBool realvirtual.Drive_DestinationMotor.StartDrive |
Start to drive Signal.
◆ TargetSpeed
| PLCOutputFloat realvirtual.Drive_DestinationMotor.TargetSpeed |
Target (maximum) speed of the drive in mm/ second.