
Public Member Functions |
Static Public Member Functions |
Public Attributes |
Protected Member Functions |
List of all members
realvirtual.RoboDKInterface Class Reference
This is the first version of the RoboDK integration. More...
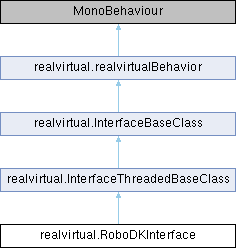
Inheritance diagram for realvirtual.RoboDKInterface:
Public Member Functions | |
| void | GetTargets () |
| Quaternion | GetRotationQuaternion (Mat mat) |
| Matrix4x4 | GetTRSFlipped (Mat rdkmat) |
| Vector3 | GetPosition (Mat rdkmat) |
| void | GetParams () |
| void | InitSignals () |
| void | StartProgramm () |
| void | StopProgramm () |
| void | StartProgramm (string programm) |
| void | SetSpeed () |
| override void | OpenInterface () |
| override void | CloseInterface () |
 Public Member Functions inherited from realvirtual.InterfaceBaseClass Public Member Functions inherited from realvirtual.InterfaceBaseClass | |
| void | UpdateInterfaceSignals (ref int inputs, ref int outputs) |
| Creates a new List of InterfaceSignals based on the Components under this Interface GameObject. | |
| Signal | CreateSignalObject (string name, SIGNALTYPE type, SIGNALDIRECTION direction) |
| Create a signal object as sub gameobject. | |
| Signal | AddSignal (InterfaceSignal interfacesignal) |
| void | RemoveSignal (InterfaceSignal interfacesignal) |
| virtual GameObject | GetSignal (string name) |
| Gets a signal with a name. | |
| void | SetAllSignalStatus (bool connected) |
| void | DestroyAllSignals () |
| void | DeleteSignals () |
| virtual void | PostAllScenesLoaded () |
| Public Member Functions inherited from realvirtual.realvirtualBehavior | |
| virtual void | OnOwnershipChanged (bool isOwner) |
| Called when network ownership changes. | |
| void | SetNetworkOwner (bool isOwner) |
| Sets IsNetworkOwner and triggers OnOwnershipChanged callback. | |
| void | PreStartSim () |
| Is called by the realvirtualController before the component is started. | |
| void | StartSim () |
| Is called by the realvirtualController to start or stop the component. | |
| void | StopSim () |
| Vector3 | DirectionToVector (DIRECTION direction) |
| Transfers the direction enumeration to a vector. | |
| DIRECTION | VectorToDirection (bool torotatoin, Vector3 vector) |
| Transfers a vector to the direction enumeration. | |
| float | GetLocalScale (Transform thetransform, DIRECTION direction) |
| List< BehaviorInterfaceConnection > | UpdateConnectionInfo () |
| List< Signal > | GetConnectedSignals () |
| void | SetVisibility (bool visibility) |
| Sets the visibility of this object including all subobjects. | |
| List< BehaviorInterfaceConnection > | GetConnections () |
| List< Signal > | GetSignals () |
| GameObject | GetChildByName (string name) |
| Gets a child by name. | |
| List< GameObject > | GetChildsByName (string name) |
| Gets all child by name. | |
| GameObject | GetChildByNameAlsoHidden (string name) |
| List< GameObject > | GetAllMeshesWithGroup (string group) |
| List< GameObject > | GetAllWithGroup (string group) |
| List< GameObject > | GetAllWithGroups (List< string > groups) |
| List< GameObject > | GetAllMeshesWithGroups (List< string > groups) |
| List< string > | GetMyGroups () |
| List< GameObject > | GetMeshesWithSameGroups () |
| List< GameObject > | GetAllWithSameGroups () |
| MeshRenderer | GetMeshRenderer () |
| Gets the mesh renderers in the childrens. | |
| void | SetCollider (bool enabled, bool includeTriggers=true) |
| sets the collider in all child objects | |
| void | ErrorMessage (string message) |
| Displays an error message. | |
| void | ChangeConnectionMode (bool isconnected) |
| void | Log (string message) |
| Logs a message. | |
| void | Log (string message, object obj) |
| Logs a message with a relation to an object. | |
| void | Warning (string message, object obj) |
| Logs a warning with a relation to an object. | |
| void | Error (string message, object obj) |
| Logs an error with a relation to an object. | |
| void | Error (string message) |
| Logs an error. | |
| GameObject | DebugPosition (string debugname, Vector3 position, Quaternion quaternation, float scale) |
| Displays a gizmo for debugging positions. | |
| void | SetFreezePosition (bool enabled) |
| Freezes all child components to the current poosition. | |
| void | SetRbConstraints (RigidbodyConstraints constraints) |
| virtual void | AwakeAlsoDeactivated () |
Static Public Member Functions | |
| static Vector3 | GetAngles (Mat source) |
| Static Public Member Functions inherited from realvirtual.realvirtualBehavior | |
| static bool | DirectionIsLinear (DIRECTION direction) |
| Gets back if the direction is linear or a rotation. | |
Public Attributes | |
| string | RoboDKApplication |
| string | RobotDKFile |
| string | RobotName |
| string | RobotDKIP |
| bool | OpenRDKOnStart |
| float | RDKSimulationSpeed |
| string | RobotProgramm |
| bool | RunProgrammOnStart |
| bool | LoopProgramm |
| bool | ProgrammIsRunning |
| bool | StopProgrammOnUnityStop |
| GameObject | TargetPrefab |
| GameObject | DebugEndEffector |
| Vector3 | EffectorPos |
| Vector3 | EffectorRot |
| Vector3 | OrigRot |
| List< Drive > | Axis |
| List< float > | CurrentAxisPosition |
| Public Attributes inherited from realvirtual.InterfaceThreadedBaseClass | |
| int | MinUpdateCycle |
| int | CommCycleMeasures |
| int | CommCycleNr |
| int | CommTimeMs |
| int | CommTimeMin |
| float | CommTimeMed |
| int | CommTimeMax |
| int | CommCycleMeasureNum |
| int | UpdateCycleMs |
| string | ThreadStatus |
| int | MinUpdateCycle2 |
| int | CommCycleNr2 |
| int | CommTimeMs2 |
| int | CommTimeMin2 |
| float | CommTimeMed2 |
| int | CommTimeMax2 |
| int | CommCycleMeasureNum2 |
| int | UpdateCycleMs2 |
| string | ThreadStatus2 |
| bool | NoThreading |
| bool | TwoThreads |
| Public Attributes inherited from realvirtual.InterfaceBaseClass | |
| bool | IsConnected |
| List< InterfaceSignal > | InterfaceSignals |
| Hashtable | SignalNamesOutputs |
| Hashtable | SignalNamesInputs |
| Public Attributes inherited from realvirtual.realvirtualBehavior | |
| string | Name |
| The name of the component if it should be different from the GameObject name. | |
| ActiveOnly | Active |
| GameObject | FromTemplate |
| realvirtualController | realvirtualController |
| bool | HideNonG44Components |
| bool | SceneIsAdditive |
| bool | ForceStop |
| bool | IsNetworkOwner |
| True when this component owns its simulation (local authority). Set to false by MultiplayerWEB on remote clients. | |
Protected Member Functions | |
| override void | CommunicationThreadUpdate () |
| override void | CommunicationThreadClose () |
| Protected Member Functions inherited from realvirtual.InterfaceThreadedBaseClass | |
| virtual void | SecondCommunicationThreadUpdate () |
| virtual void | SecondCommunicationThreadClose () |
| Protected Member Functions inherited from realvirtual.InterfaceBaseClass | |
| void | OnConnected () |
| void | OnDisconnected () |
| void | OnEnable () |
| void | OnDisable () |
| Protected Member Functions inherited from realvirtual.realvirtualBehavior | |
| bool | hidename () |
| bool | hideactiveonly () |
| virtual void | OnStopSim () |
| virtual void | OnPreStartSim () |
| virtual void | OnStartSim () |
| MU | GetTopOfMu (GameObject obj) |
| Gets the top of an MU component (the first MU script going up in the hierarchy) | |
| void | InitGame4Automation () |
| Initialiates the components and gets the reference to the realvirtualController in the scene. | |
| virtual void | AfterAwake () |
| void | Awake () |
Additional Inherited Members | |
| Public Types inherited from realvirtual.realvirtualBehavior | |
| enum | ActiveOnly { Always , Connected , Disconnected , Never , DontChange } |
| Properties inherited from realvirtual.InterfaceBaseClass | |
| virtual string | InterfaceDisplayName [get] |
| Display name for interface in UI lists (removes "Interface" suffix by default, can be overridden for custom names) | |
| virtual bool | ShowIsConnectedField [get] |
Detailed Description
This is the first version of the RoboDK integration.
Still in Beta and some interactions from Unity side like showing Targets, following in Editmode... are missing.
Member Function Documentation
◆ CloseInterface()
|
virtual |
Reimplemented from realvirtual.InterfaceThreadedBaseClass.
◆ CommunicationThreadClose()
|
protectedvirtual |
Reimplemented from realvirtual.InterfaceThreadedBaseClass.
◆ CommunicationThreadUpdate()
|
protectedvirtual |
Reimplemented from realvirtual.InterfaceThreadedBaseClass.
◆ OpenInterface()
|
virtual |
Reimplemented from realvirtual.InterfaceThreadedBaseClass.