Discrete event simulation will never be the same again.
The tools most factories still use for material flow simulation were built back in the 2000s. Plant Simulation, AutoMod, AnyLogic, Visual Components. Powerful, but heavy desktop software, license locked, and a single seat runs well over ten thousand euros before you model one conveyor.
We think the future of simulation is the web. Open source, running in a browser tab, shared with a link instead of a license dongle.
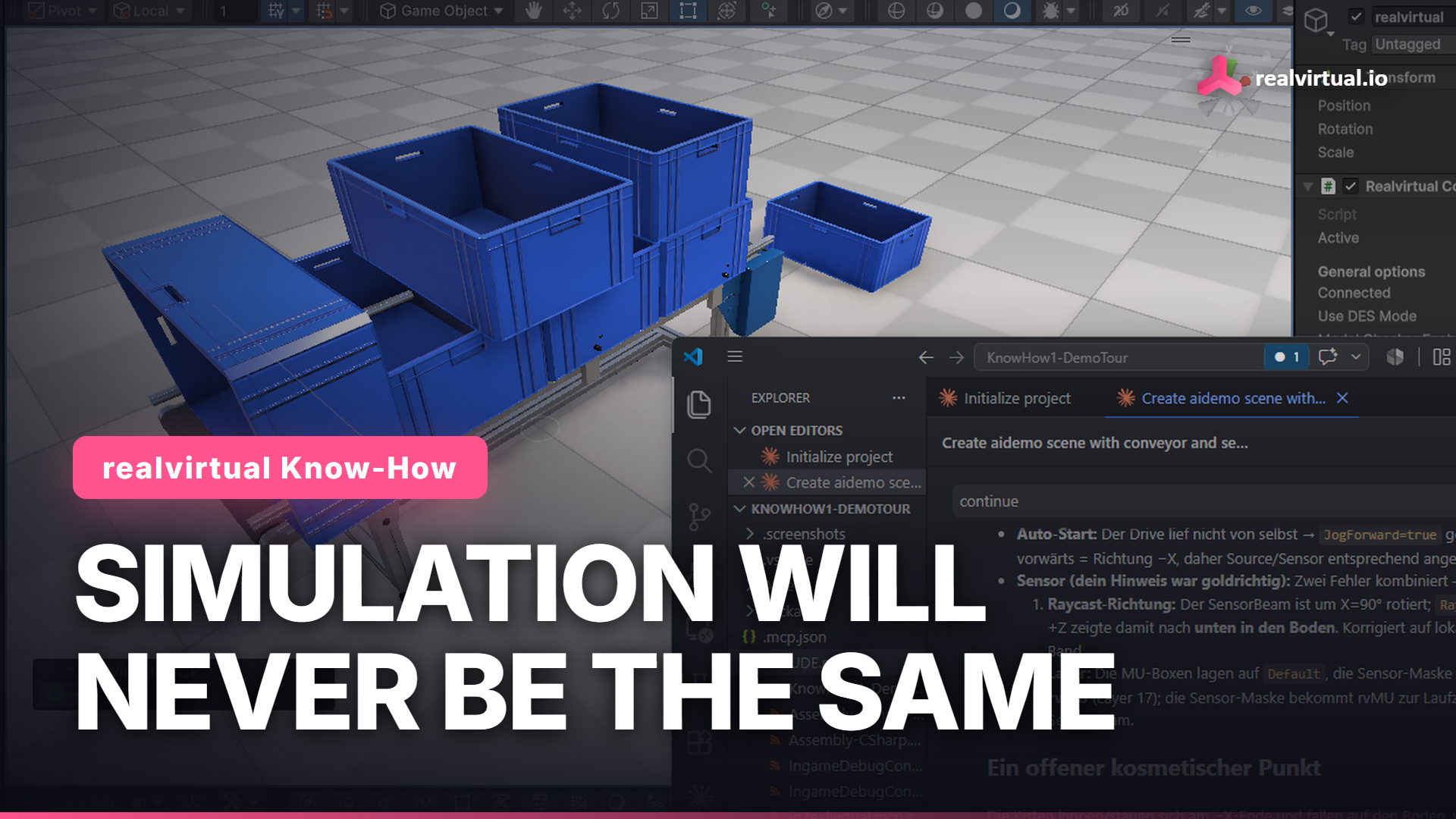
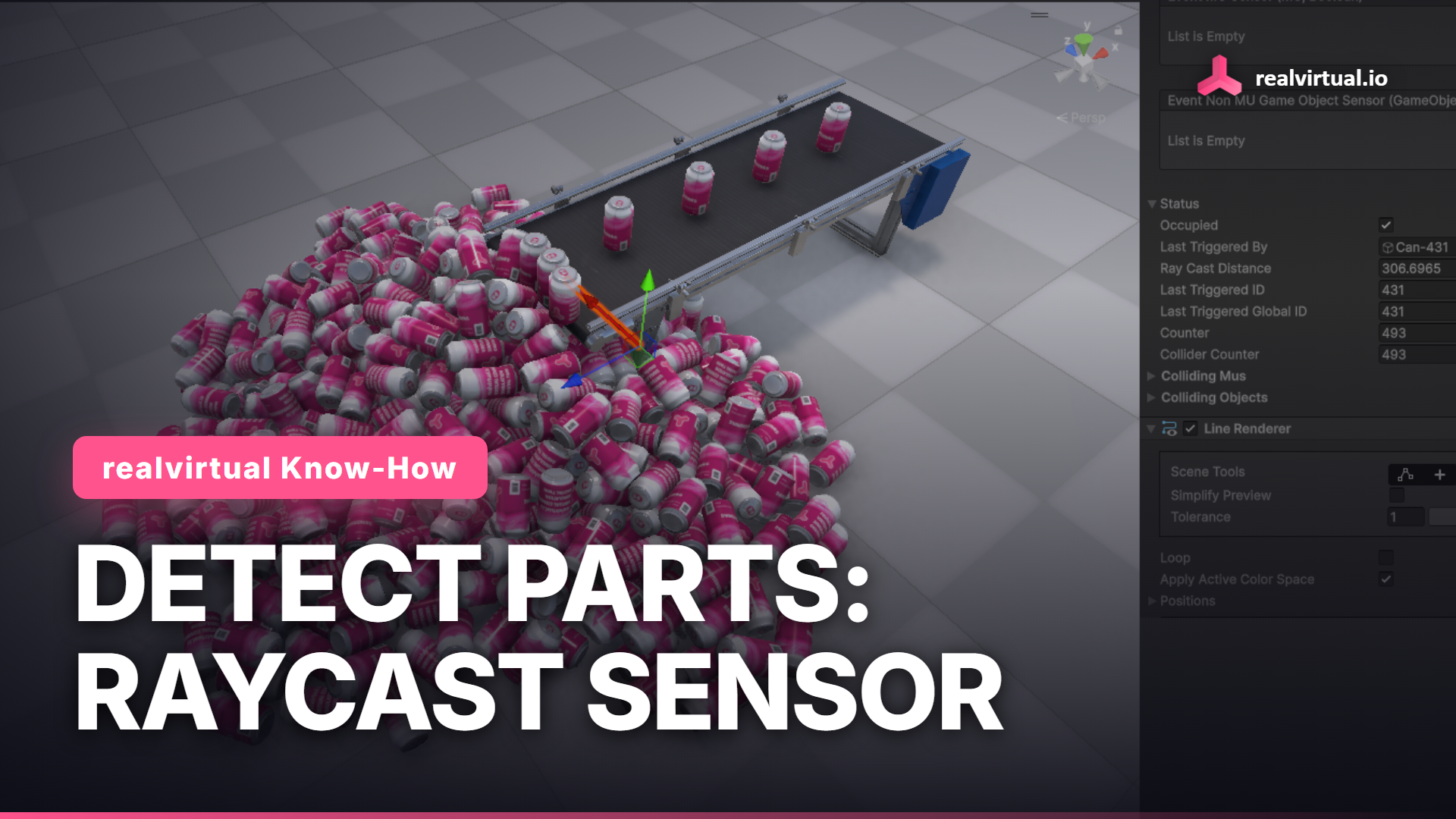
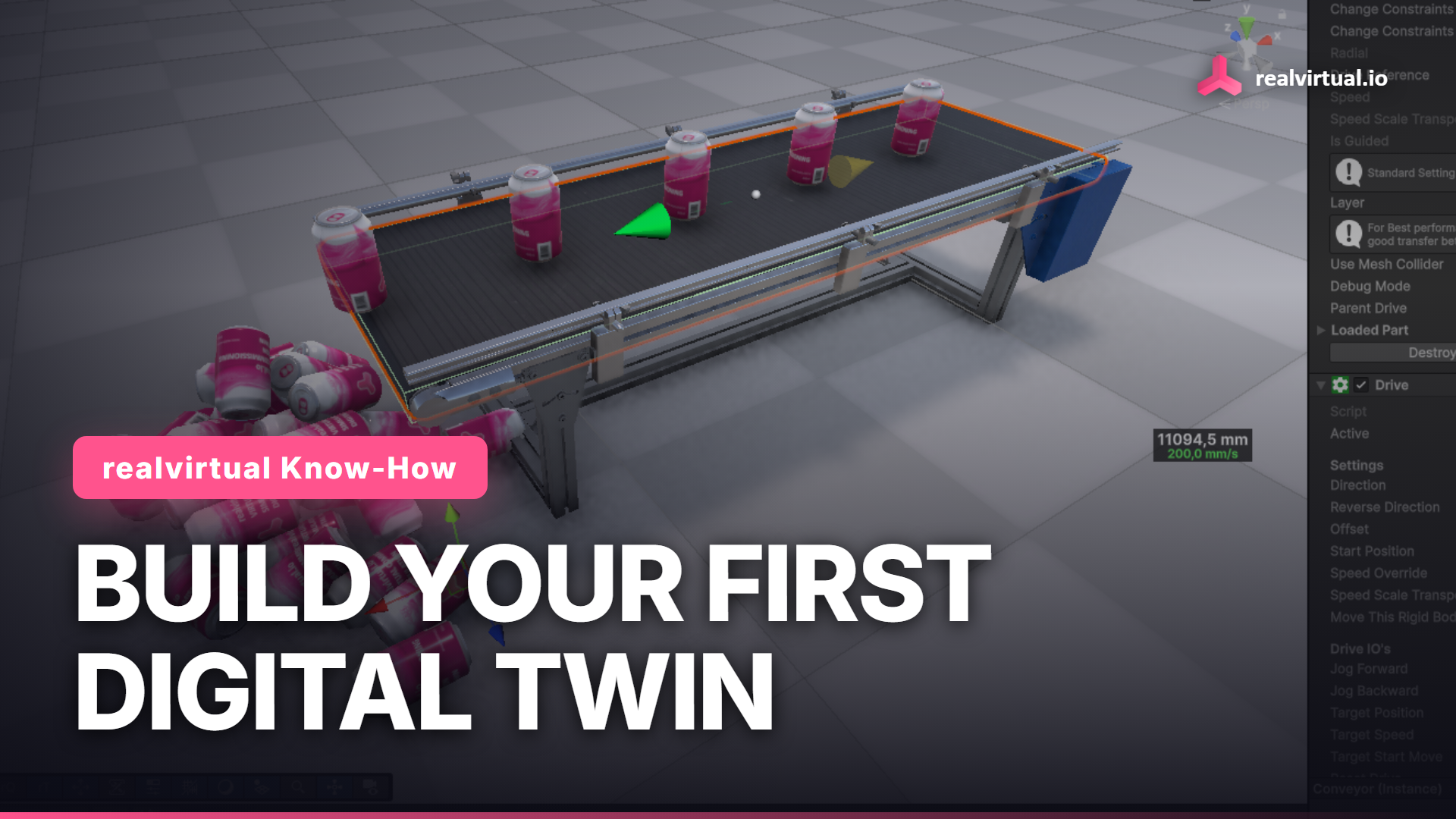
What you see here is DES running live in the browser. The model is still simple, a turntable conveyor loop, but the DES core is already there: throughput per hour on every component, utilization and bottlenecks read straight off the model while it runs at ten times real time.
And it is one model, not two. The layout you planned is the model you simulate, on the same GLB, with the 3D built into the core instead of bolted on for a screenshot.
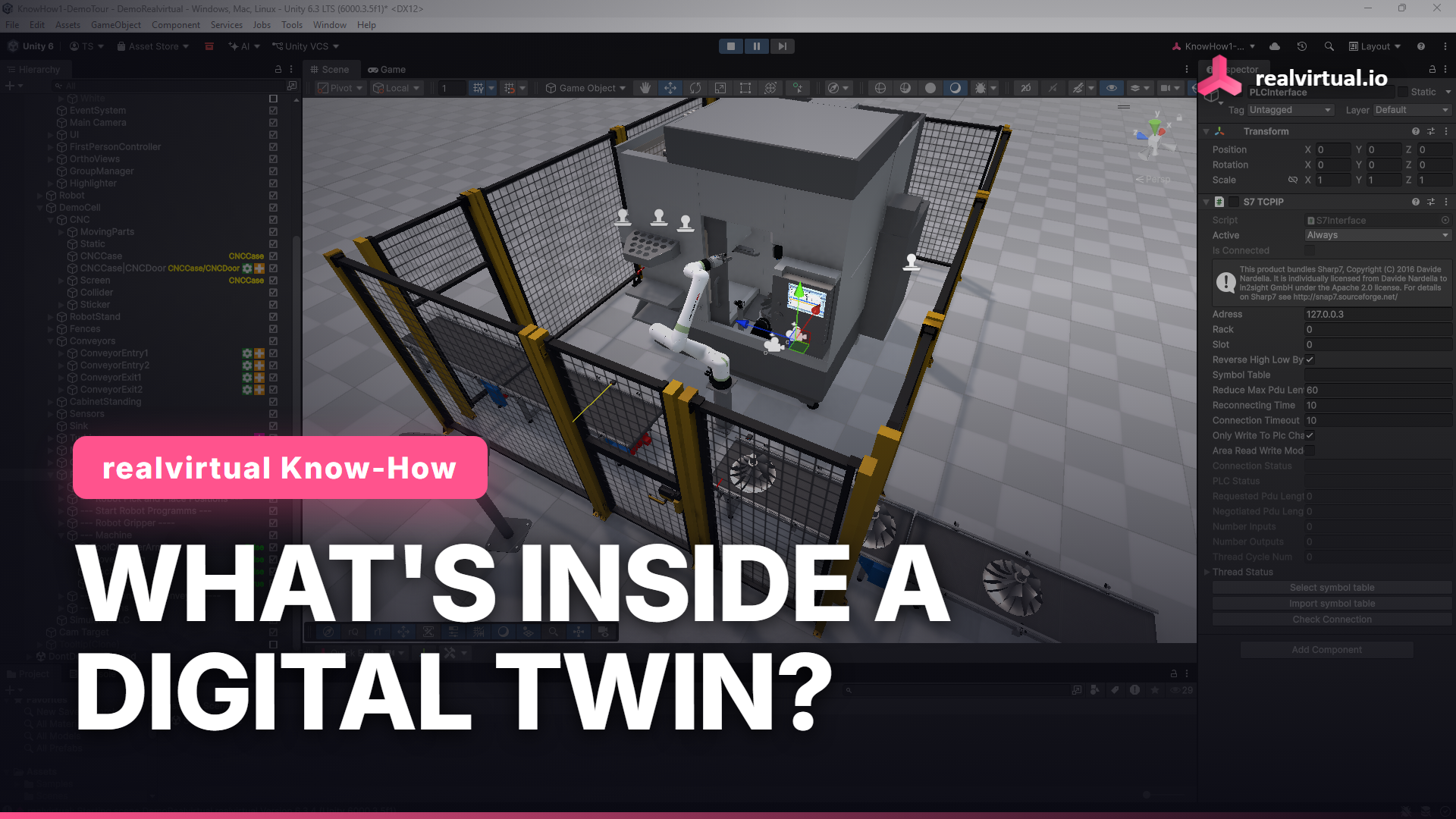
It is AI first. Build your simulation models with AI, and point Claude or Cursor straight at the running scene through the MCP bridge to build and debug them with you.
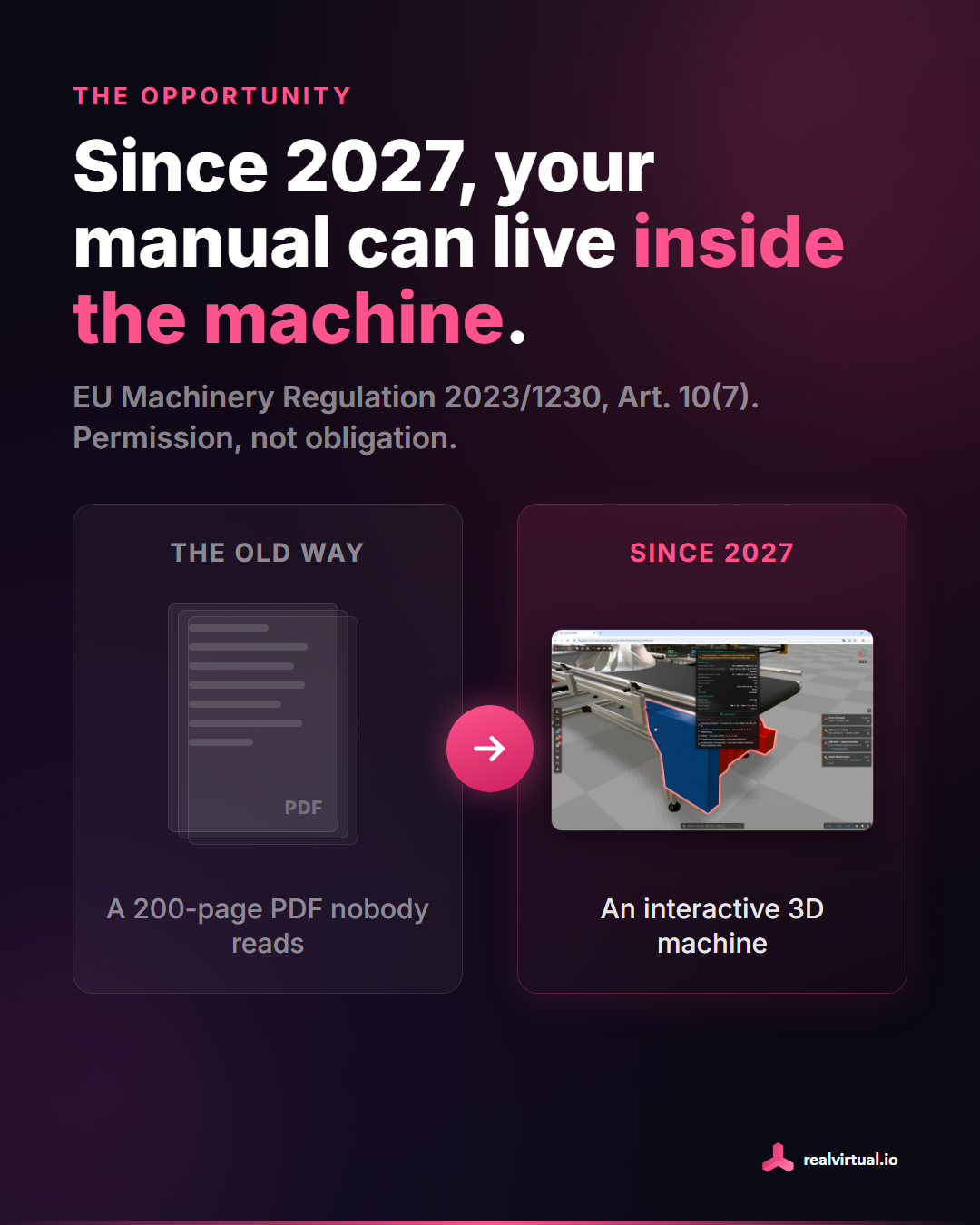
It changes the math too. A simulation study that used to eat twenty days or more now takes five or less. You keep the creative part, deciding what to model and what the line has to prove. The AI takes the painful part.
This is an early look. DES is not on GitHub yet, we are still building it and it will change. The rest of realvirtual Web is already open source on GitHub today, so you can try the viewer with your own line.